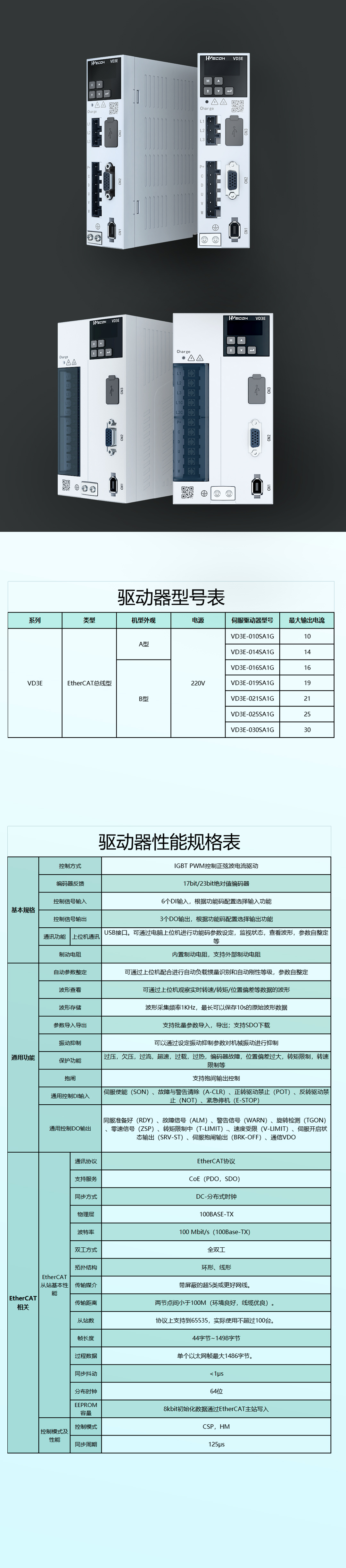
型号 | 电源电压 | 最大电流 |
VD3E-016SA1G | 220V | 16A |
VD3E-019SA1G | 220V | 19A |
VD3E-021SA1G | 220V | 21A |
VD3E-025SA1G | 220V | 25A |
VD3E-030SA1G | 220V | 30A |
VD3E-016TA1G | 380V | 16A |
VD3E-019TA1G | 380V | 19A |
VD3E-021TA1G | 380V | 21A |
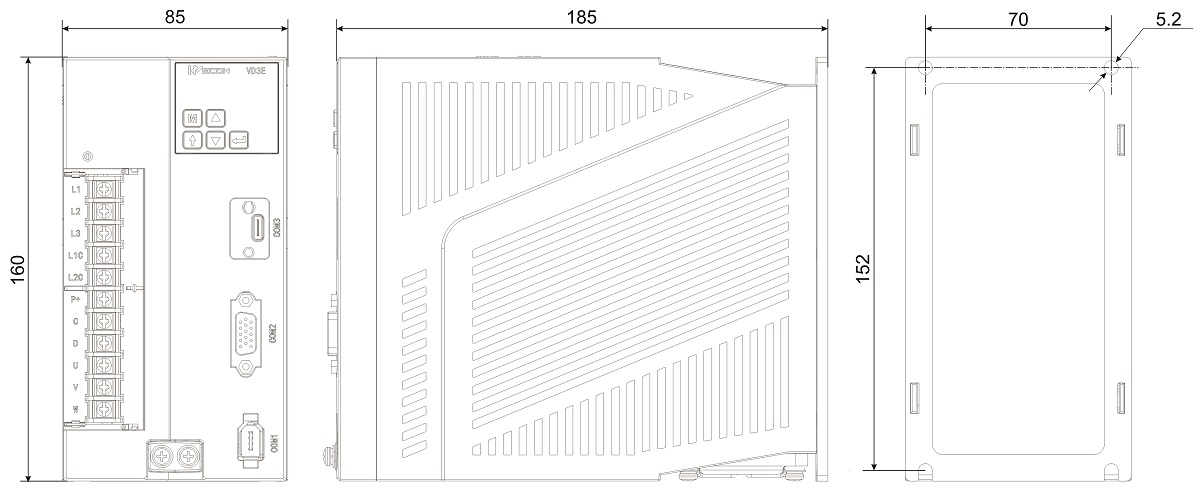
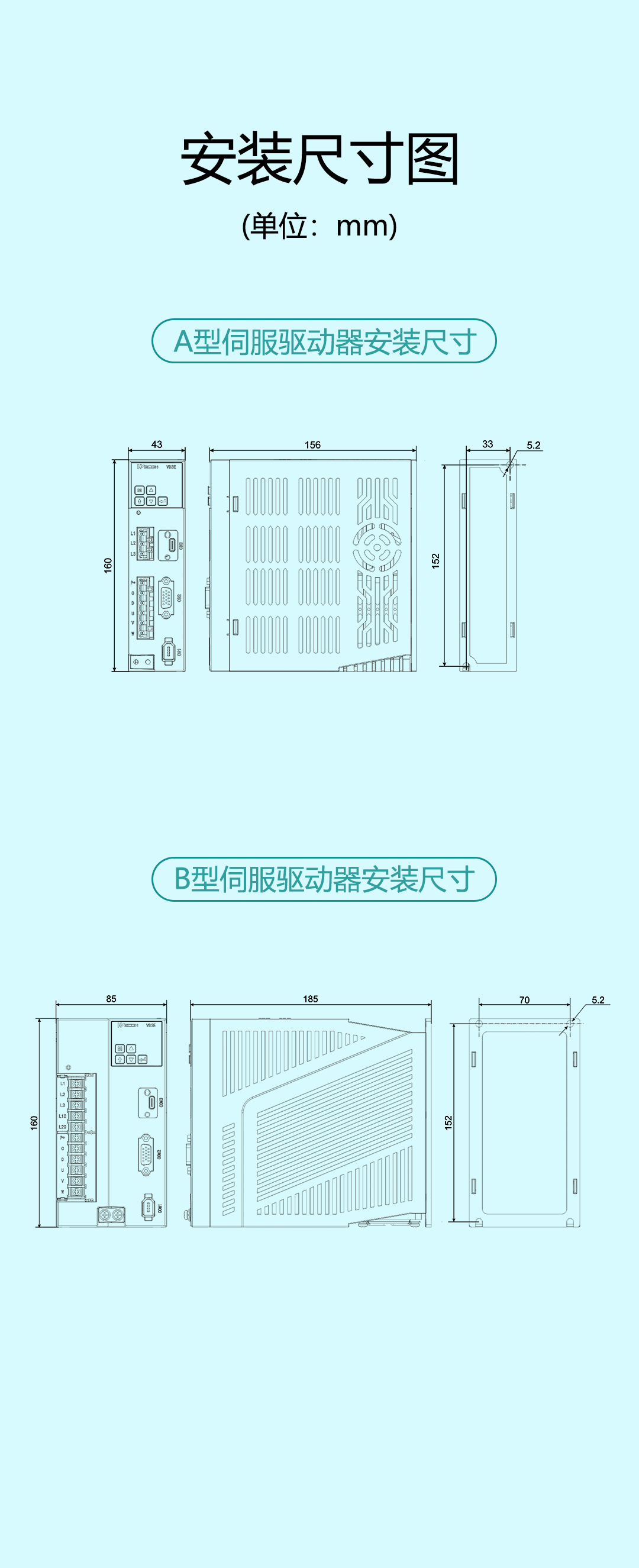
项目 | VD3E(B型) | ||
基本规格 | 电源 | 220V/380V供电 | |
控制方式 | IGBT PWM控制正弦波电流驱动 | ||
编码器反馈 | 17bit/23bit绝对值编码器 | ||
控制信号输入 | 6个DI输入,根据功能码配置选择输入功能 | ||
控制信号输出 | 3个DO输出,根据功能码配置选择输出功能 | ||
通讯功能 | 上位机通讯 | USB接口。可通过电脑上位机进行功能码参数设定,监视状态,查看波形,参数自整定等 | |
制动电阻 | 内置制动电阻,支持外部制动电阻 | ||
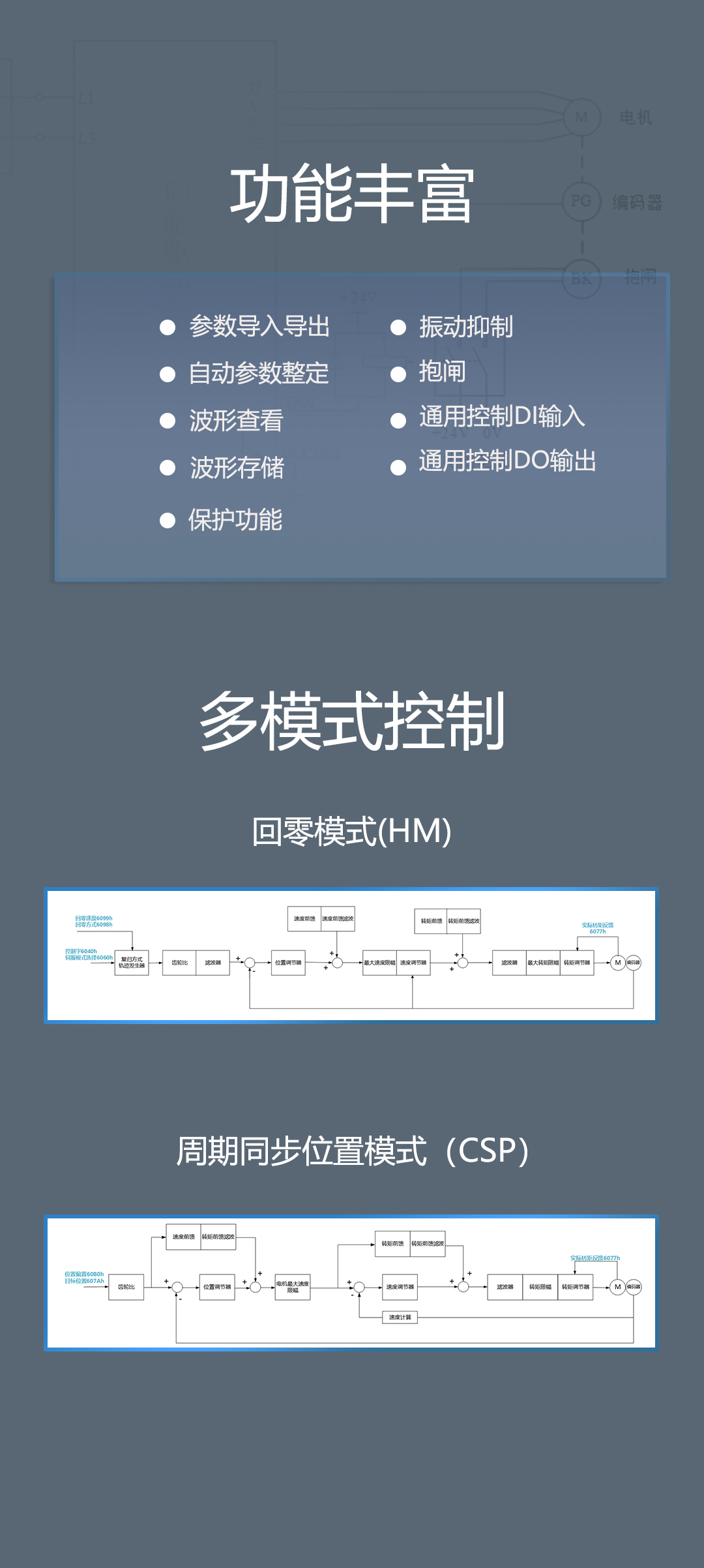
通用功能 | 自动参数整定 | 可通过上位机配合进行自动负载惯量识别和自动刚性等级,参数自整定 | |
波形查看 | 可通过上位机观察实时转速/转矩/位置偏差等数据的波形 | ||
波形存储 | 波形采集频率1K Hz,最长可以保存10s的原始波形数据 | ||
参数导入导出 | 支持批量参数导入,导出;支持SDO下载 | ||
振动抑制 | 可以通过设定振动抑制参数对机械振动进行抑制 | ||
保护功能 | 过压,欠压,过流,超速,过载,过热, | ||
抱闸 | 支持抱闸输出控制 | ||
通用控制DI输入 | 故障与警告清除(A-CLR)、正转驱动禁止(POT) | ||
通用控制DO输出 | 伺服准备好(RDY)、故障信号(ALM)、警告信号(WARN)、旋转检测(TGON) | ||
EtherCAT 相关 | EtherCAT 相关 | 通讯协议 | EtherCAT协议 |
支持服务 | CoE(PDO,SDO) | ||
同步方式 | DC-分布式时钟 | ||
物理层 | 100BASE-TX | ||
波特率 | 100 Mbit/s(100Base-TX) | ||
双工方式 | 全双工 | ||
拓扑结构 | 环形、线形 | ||
传输媒介 | 带屏蔽的超5类或更好网线 | ||
传输距离 | 两节点间小于100M(环境良好,线缆优良) | ||
帧长度 | 44字节~1498字节 | ||
过度数据 | 单个以太网帧最大1486字节 | ||
同步抖动 | <1μs | ||
分布时钟 | 64位 | ||
EEPROM容量 | 8k bit初始化数据通过EtherCAT主站写入 | ||
控制模式 及性能 | 控制模式 | CSP、HM、CSV、CST、PT | |
同步周期 | 125μs | ||