关于我们
关于维控
加入维控
产品中心
HMI(人机界面)
PI9000ig系列(物联网)
PI8000ig系列(物联网)
PI3000ig系列(物联网)
PI3000ie 系列
PI3000i 系列
IN系列
WP系列
IND型号
无壳系列
PLC(可编程逻辑控制器)
平台型PLC
中型PLC
小型PLC
LX6/AC60系列IO
小型PLC扩展模块
小型PLC BD模块(LX3V)
小型PLC BD模块(LX5V)
modbus远程IO
V-BOX(智能物联网网关)
V-BOX(H)系列
V-BOX(E)系列
V-BOX(L)系列
V-BOX(RE)系列
V-BOX(RH)系列
伺服系统
VD2
VD2F
VD2L
P20
VD3E(总线伺服)
VD5L(总线伺服)
VD5E(总线伺服)
电机
控制系统
运动控制器
视觉控制器
解决方案
物联网解决方案
智慧水务
智慧工业
智慧农业
智慧环保
智慧城市
自动化解决方案
印刷包装
纺织机械
建筑建材
五金机床
先进制造
橡塑机械
工业物联网
慧网(V-NET 2.0)简介
企智云
云上私有化解决方案
软硬件一体化解决方案
物联网智能终端
解决方案
慧网2.0APP
物联网云平台注册(慧网2.0)
服务支持
下载中心
售后服务
培训服务
伺服选型工具
证书查询
新闻中心
新品速递
方案上新
维控新闻
联系我们
中文
EN
ES
PT
RU
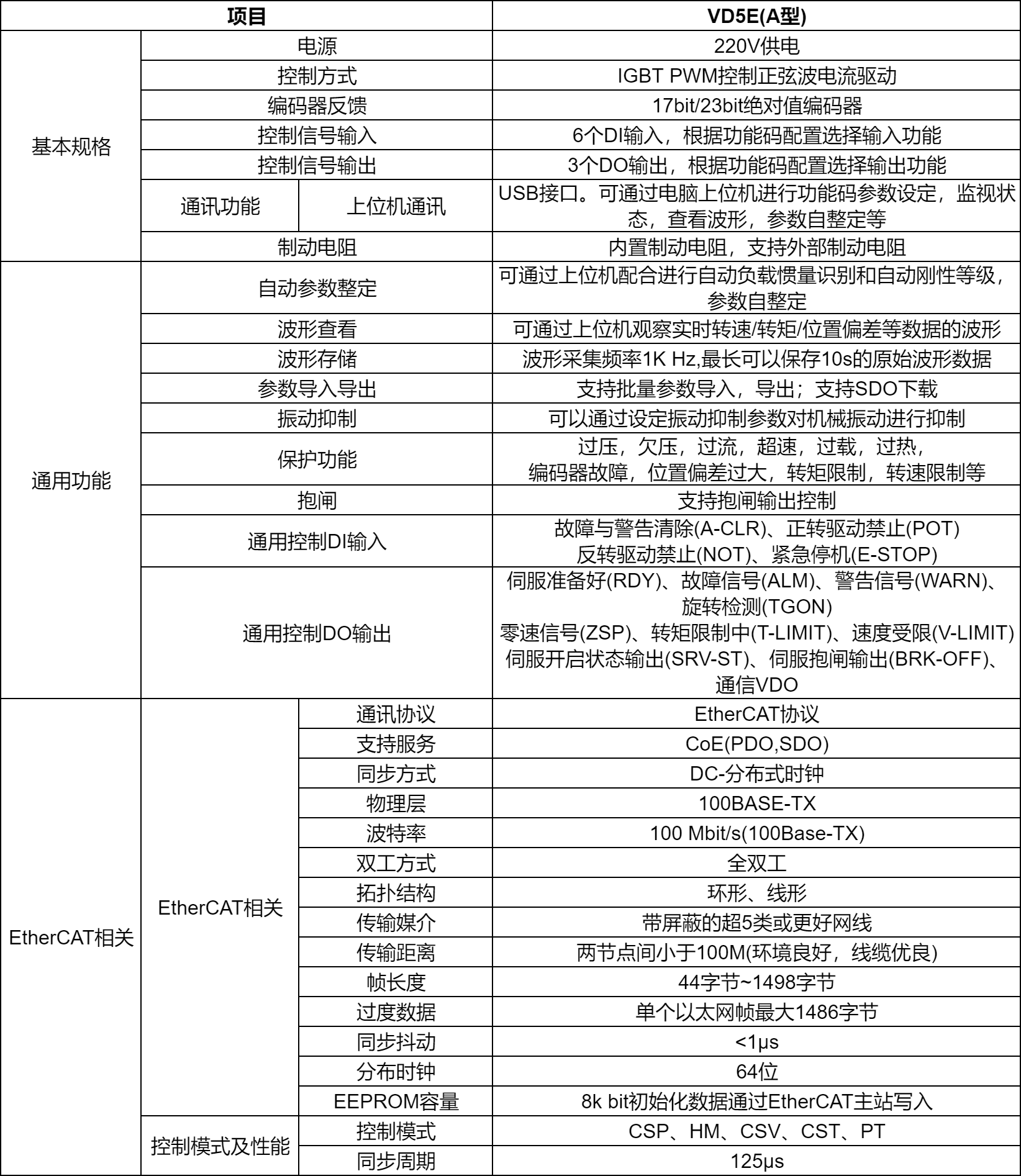
VD5E系列(A型)
EtherCAT 总线伺服驱动器,设备兼容性优异。
采用双板设计,高低压电路分离,运行稳定可靠。
支持多种控制模式,可满足复杂多样的应用需求。
产品详情下载
咨询留言
规格参数
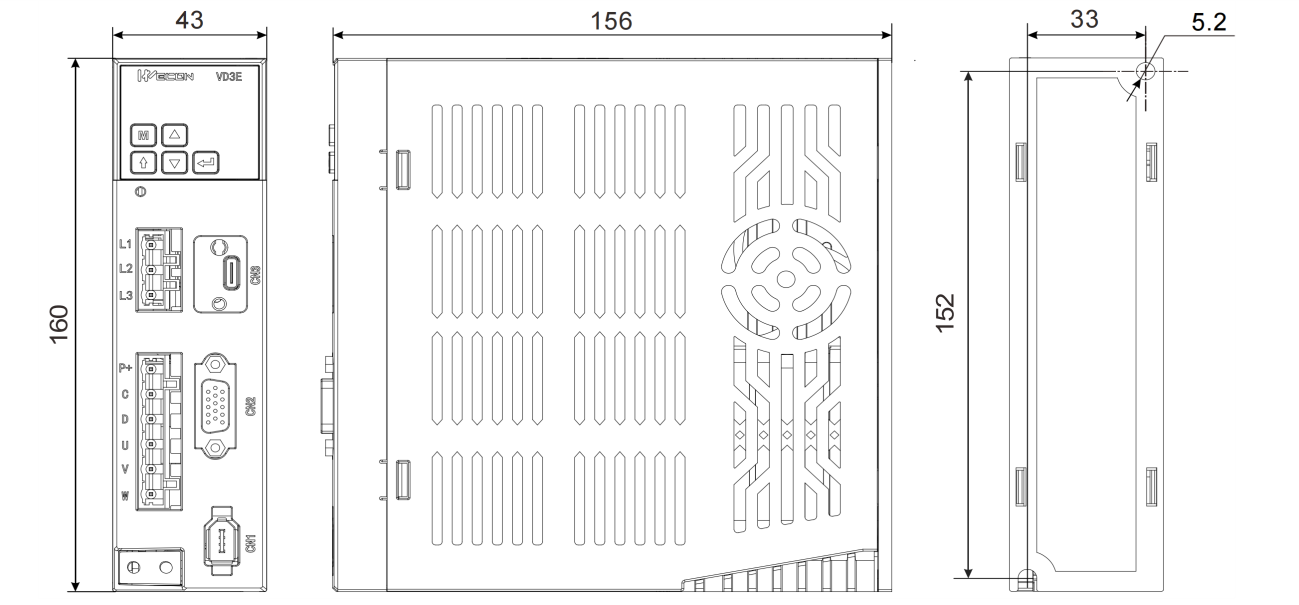
安装尺寸图