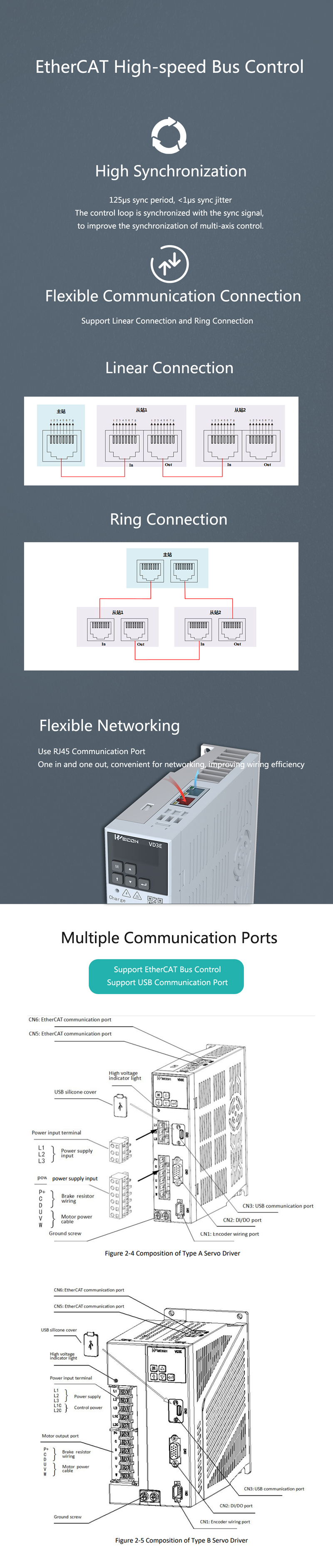
EtherCAT bus servo drive with strong device compatibility.
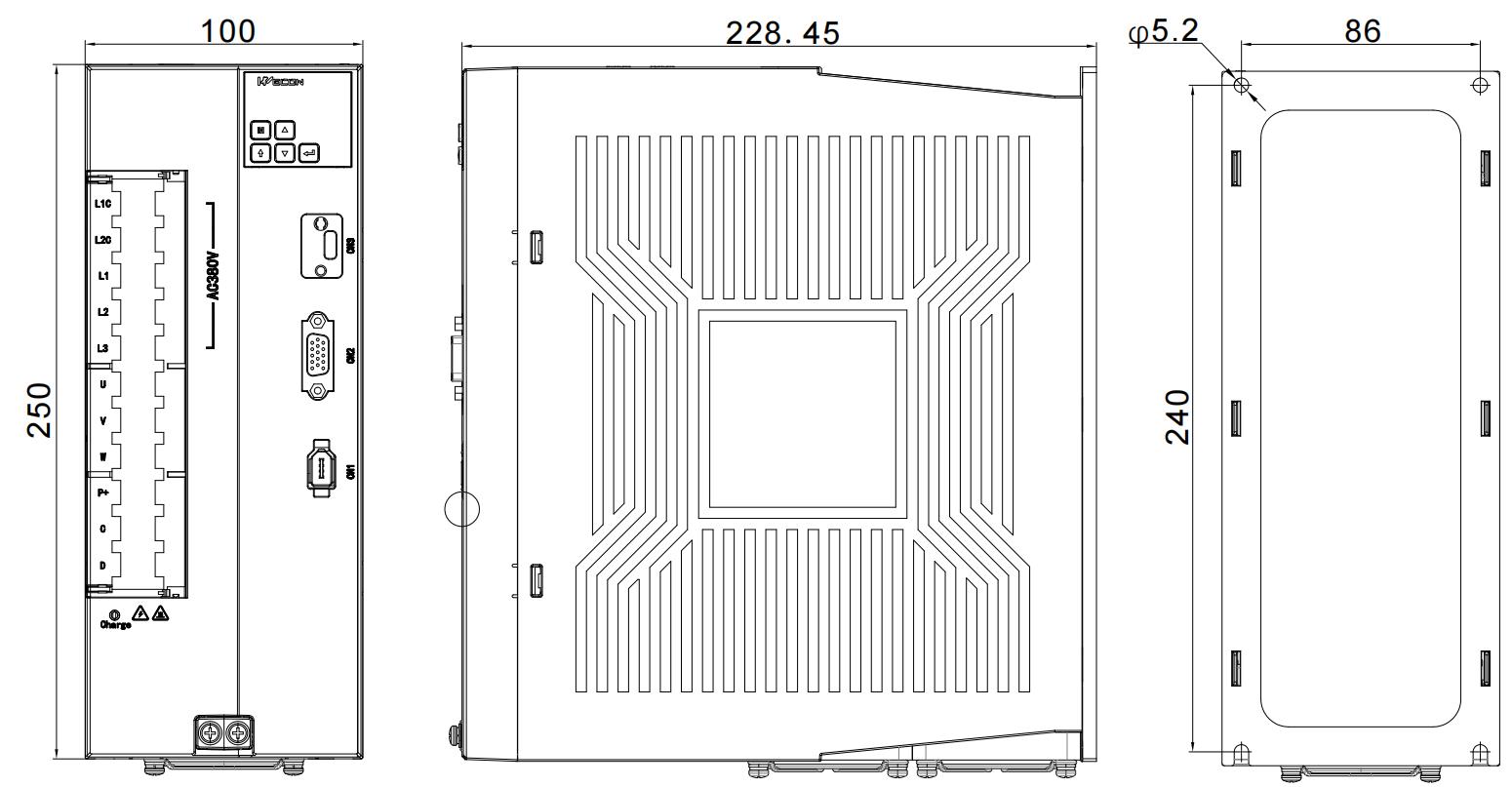
Dual-board design structure, separation of high and low voltage.
380V power supply, large load power to meet users' complex application scenarios.

Type | Voltage and Current |
VD3E-030TA1G | Input voltage: 380V, Maximum output current: 30A |
VD3E-040TA1G | Input voltage: 380V, Maximum output current: 40A |
VD3E-050TA1G | Input voltage: 380V, Maximum output current: 50A |
Specifications | VD3E(C Type) | ||
Basic Specifications | Power supply | 380V | |
Control method | IGBT PWM control sine wave current drive | ||
Encoder | 17bit, 23bit absolute value encoder | ||
Control signal input | 6DI, Select the input function according to the function code configuration | ||
Control signal output | 3DO, Select the output function according to the function code configuration | ||
Communication | Host computer | The USB interface can be used to set function code parameters, monitor status, view waveforms, and perform parameter self-tuning, etc. via a computer host. | |
Braking resistor | Internal braking resistor(also support external braking resistor) | ||
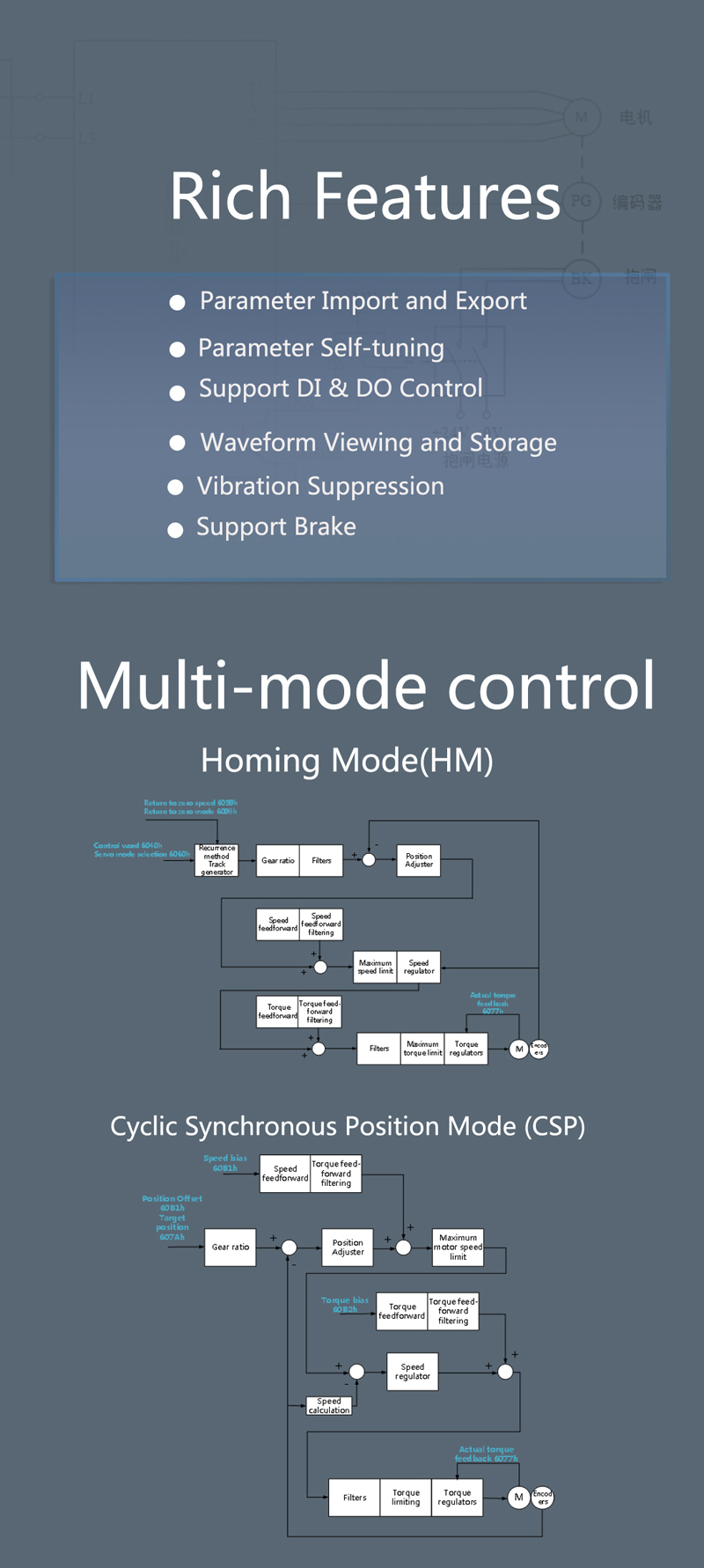
General functions | Auto-tuning | Automatic load inertia identification, automatic rigidity self-tuning (SCTool) | |
Waveform monitoring | Monitor real-time speed/torque/position(SCTool) | ||
Waveform recording | Waveform acquisition frequency 1K Hz,10s waveform data recording | ||
Parameter management | Support batch parameter import and export; Support SDO modification | ||
Vibration suppression | Support mechanical vibration suppression | ||
Protection | Overvoltage, undervoltage, overcurrent, overspeed, overload, overheating, encoder failure, excessive position deviation, torque limit, speed limit, etc. | ||
Brake device | Support brake signal output | ||
DI function | Error/alarm clear(A-CLR), Forward rotation prohibited(POT)Backward rotation prohibited(NOT), Emergency stop(E-STOP) | ||
DO function | Servo ready(RDY)、Error signal(ALM), Alarm signal(WARN), Rotation detection(TGON) | ||
EtherCAT related | EtherCAT related | Communication protocol | EtherCAT protocol |
Support services | CoE(PDO,SDO) | ||
Sync mode | DC-Distributed Clock | ||
Physical layer | 100BASE-TX | ||
Baud rate | 100 Mbit/s(100Base-TX) | ||
Duplex mode | Full duplex | ||
Topology | Circular, linear | ||
Transmission | Shielded Category 5e or better network cable | ||
Transmission distance | Less than 100M between two nodes (good environment, good cables) | ||
Frame length | 44 bytes to 1498 bytes | ||
Excessive data | Maximum size of a single Ethernet frame is 1486 bytes | ||
Sync jitter | <1μs | ||
Distributed clock | 64 bit | ||
EEPROM capacity | 8k bit initialization data is written through the EtherCAT master station | ||
Control mode and performance | Control mode | CSP、HM、CSV、CST、PT | |
Sync period | 125μs | ||